La NASA prepara una campaña de aterrizajes y robots en el polo sur lunar para medir hielo, terreno y comunicaciones, y reducir riesgos antes de estancias humanas.
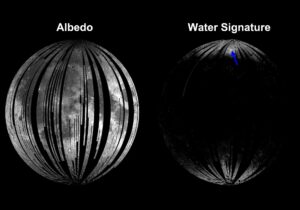
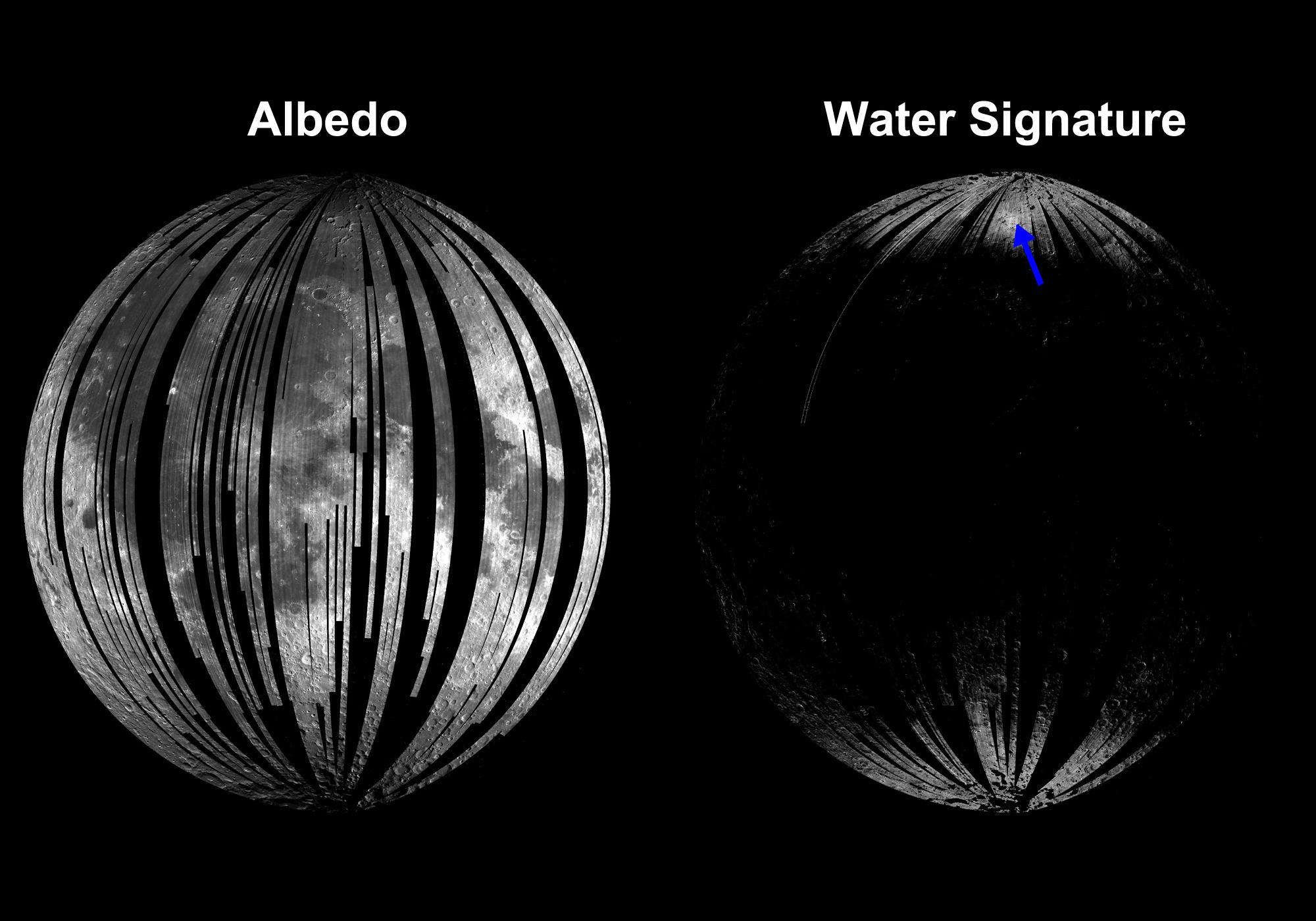
Una “filtración” sugiere que la NASA planea varias misiones robóticas al polo sur lunar antes de instalar infraestructura para astronautas. La clave es que gran parte de ese enfoque ya está respaldado por anuncios y planes públicos: la agencia quiere construir capacidad en superficie vuelo a vuelo, con entregas comerciales que lleven instrumentos, rovers y demostradores tecnológicos a zonas polares. El objetivo operativo es llegar a un ritmo alto de misiones no tripuladas que permitan elegir sitios de aterrizaje, medir recursos y probar hardware en condiciones reales. En el polo sur hay cráteres en sombra permanente donde podría existir hielo de agua, un recurso útil para producir agua potable, oxígeno y, a futuro, propelente. Esa promesa convive con un entorno duro: frío extremo, sombras largas y geometrías de relieve que complican energía y enlace con la Tierra.
El mecanismo central es CLPS, Servicios Comerciales de Carga Útil Lunar. En vez de diseñar cada módulo, la NASA compra “entrega a la Luna” a empresas: integración de carga, lanzamiento, alunizaje y operación por un periodo acotado. Cada misión baja paquetes de instrumentos para medir polvo, radiación, temperaturas, navegación y propiedades del suelo. Regolito es la capa de polvo y fragmentos sueltos que cubre la Luna, y su comportamiento importa porque afecta perforación, ruedas, estabilidad y el levantamiento de partículas durante el descenso. Con estos datos, la agencia calibra modelos y reduce incertidumbre para aterrizadores más grandes y para actividades humanas cercanas a zonas con hielo.
La urgencia se entiende por la cadencia que se está poniendo sobre la mesa. En su realineamiento reciente, NASA habló de acelerar CLPS hacia hasta 30 aterrizajes robóticos a partir de 2027 y, en paralelo, su administración ha empujado la idea de un ritmo mensual en el polo sur. Eso cambia el juego operativo: pasar de misiones aisladas a una logística repetible, con ventanas frecuentes para corregir fallas, iterar diseños y desplegar piezas complementarias. También permite “apilar” capacidades, por ejemplo perforación y análisis de volátiles en una misión, comunicaciones locales en otra y navegación de precisión en la siguiente, sin depender de un solo alunizaje perfecto.
En el corto plazo, estas misiones pueden abrir rutas seguras de movilidad, validar comunicaciones de superficie y demostrar extracción y análisis de muestras en sitio, como PRIME-1 con su taladro TRIDENT y el espectrómetro MSOLO. El límite actual es que la energía solar y la temperatura imponen ventanas de operación, y las sombras profundas siguen siendo un reto para supervivencia térmica y navegación. Los próximos pasos apuntan a misiones coordinadas entre proveedores, más relés de comunicaciones y robots que puedan acercarse a regiones en sombra sin perder enlace, para que la llegada de astronautas ocurra con mapas, procedimientos y márgenes de seguridad ya probados.
Fuente: nasa.goV